立命館大学の清水です。論文が IEEE Trans. Energy Convers. に採択されましたので、日本語で解説します。原論文はこちら(オープンアクセス)からどうぞ。
深層生成モデルを活用したIPMSMの自動設計
2022年は Stable Diffusion などの汎用的な画像生成技術が次々と発表された衝撃的な年でした。本論文の手法は、画像生成に用いられる深層生成モデルを埋込磁石同期モータ (IPMSM: Interior Permanent Magnet Synchronous Motor) の設計に活用し、最大トルクと磁石量に関する設計最適化を15秒弱で完了します。(厳密には、近年流行りの拡散モデルとは異なる手法です。)深層生成モデルにより設計した IPMSM の回転子形状の運転特性を、特性予測モデルを用いて予測することで、与えられた要求仕様を満たす形状を瞬時に最適設計します。
0. 忙しい方へ
- 深層学習には多量のデータセットが必要なので、小規模な機械学習モデルを用いて少量の有限要素解析データから十分量の訓練データを生成します
- 生成した訓練データを用いて、2つの深層学習モデルを構築します
- 1つ目は回転子を設計する深層生成モデルで、画像のようにエンコードした回転子形状を生成します
- 2つ目はモータ特性を予測する回帰モデルで、有限要素解析のサロゲートモデルとしての役割を果たします
- これら2つのモデルを組み合わせて自動設計システムを構築し、有限要素解析なしで高速に設計最適化を実施します(磁石量とトルクの最適化を15秒弱)
1. 訓練データの生成
本研究では深層学習を活用した自動設計システムを構築します。深層学習では大量の訓練データが必要となります。有限要素解析を代替するモデルを構築する場合、データセットは原則有限要素解析により生成するため、データセット生成自体に多くの計算時間を要します。(研究開始時のD1当時の計算環境では、10万データの生成に2.36年を要し、正攻法ではデータ生成だけで博士後期課程が終わる試算でした。)
そこで、データ生成にも機械学習を活用して、短時間で十分量のデータセットを生成しよう、というのが本研究の最初のアイデアでした。いわゆる半教師あり学習に分類される手法です。
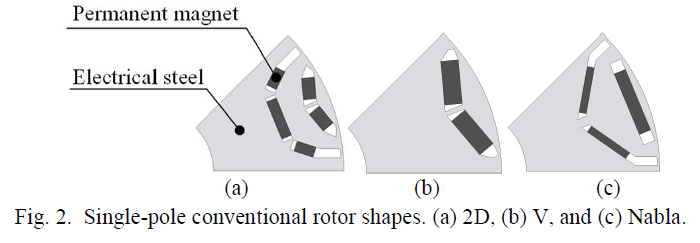
対象はIPMSMのロータ形状です。次の3つのトポロジーを対象とします。
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
機械学習を用いて寸法情報からモータ特性を予測する手法は、先行研究で提案済みでした。訓練データに関しては、主要な寸法をパラメトリックに乱数生成し、ランダムな電流条件で有限要素解析することで、形状・電流・特性のデータセットを入手していました。ここで特性は、3種類のモータパラメータ(永久磁石による電機子鎖交磁束、d,q 軸インダクタンス)です。
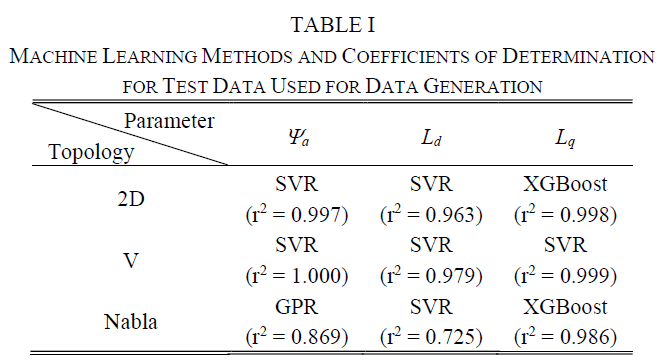
先行研究の手法は、少ないデータ数による訓練で高精度な予測を達成しましたので、この手法を2D, V, Nabla の3種類に適用しました。次の表は、機械学習手法とテストデータに対する予測精度です。
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
ここで、$\varPsi_a$ は永久磁石による電機子鎖交磁束、$L_d, L_q$ はそれぞれ d, q 軸インダクタンス、$r^2$ はテストデータに対する決定係数(1に近いほど高精度)、SVR はサポートベクター回帰(Support Vector Regression)、GPR はガウス過程回帰(Gaussian Process Regression)です。
ここで着目したいのが、Nabla の永久磁石による電機子鎖交磁束と d 軸インダクタンスに対する決定係数が低い点です。要因は未解明ですが、次に生成するデータセットにおいて、Nabla の $\varPsi_a, L_d$ のみ高確率で大きな誤差が含まれます。この影響は、3,4章でも言及します。
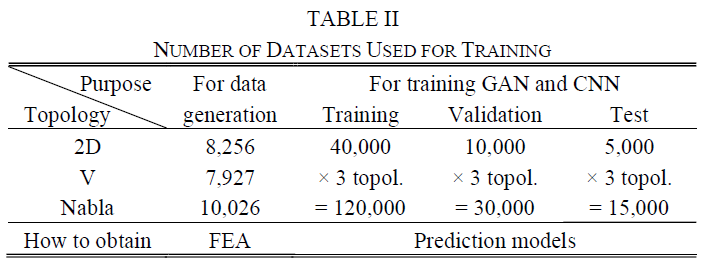
構築した機械学習モデルの学習に用いた訓練データ数は合計26,209でした。本研究では、学習した予測モデルを用いて合計165,000形状の特性データを生成しました。データ生成時間は3.6時間であり、短時間で十分量のデータセットを入手できました。
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
2. 深層生成モデル
訓練データが手に入ったので、続いてモデルを学習します。1つ目は回転子を設計するための深層生成モデルです。生成には、敵対的生成ネットワーク(GAN: Generative Adversarial Network)を使用します。GANでは、画像を生成する生成器と、入力された画像が本物か偽物(生成画像)かを見分ける識別器の、2種類のニューラルネットワークを用いて学習を行います。(詳細な説明は省略します。)本論文では、Lightweight GAN という小規模データでも安定した画像生成が可能なモデルを使用します。
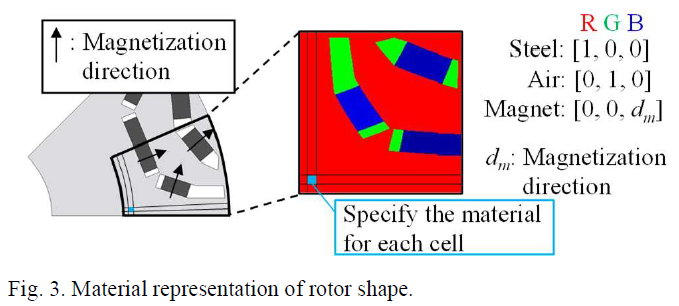
画像生成モデルを用いて回転子を設計するので、回転子を画像のように表現します。回転子を極座標系で格子点分割し、各領域の材料が電磁鋼板/空気/永久磁石のいずれかという情報を画像のRGBに見立てて、形状を画像に変換します。
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
ここで、永久磁石には着磁方向 $\vartheta_{PM}$ の情報も存在するので、青色の明度で表現します。

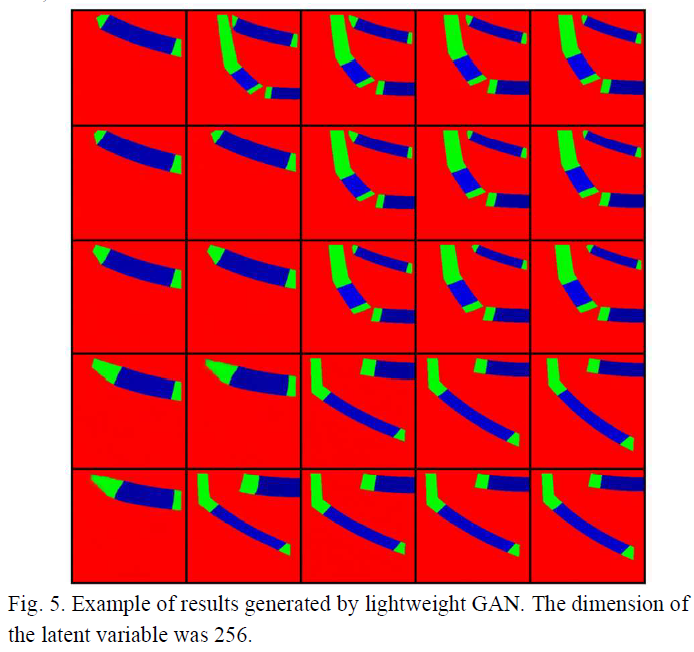
このように画像にエンコードした回転子形状データを用いてGANを学習します。生成器は、潜在変数空間(画像のもととなるようなノイズ空間)と画像の関係を学習しています。そのため、潜在変数空間内の1つの点を生成器に入力すると、出力としてある画像が得られます。一例として、潜在変数空間上でベクトルを等間隔に動かしていくと、次のような画像が生成できます。
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
高精細な回転子画像を出力できる生成器が入手できました。
深層生成モデルを導入する一番の利点は、異なるトポロジーの回転子を統一の潜在変数空間で扱える点です。例えば、磁石の数が異なる回転子形状では、最適設計時に割り当てるべき設計変数の次元が異なり、それらを同時に扱うことは難しいです。他方、深層生成モデルでは統一の潜在変数空間内で異なるトポロジーを表現するため、複数のトポロジーを同時に考慮した最適設計が容易に実現できます。
(ある程度詳しいひと向け)寸法などの設計パラメータをそのまま設計最適化に使用すると、その上下限値に変数間の依存性があるため設定が非常に煩雑になります。他方GANでは、潜在変数空間に明示的な確率分布を仮定していないので、最適化時の上下限制約をラフに設定できます。(VAEではなくGANを採用した理由もここです。)もちろん、GANは(本研究の設定では)基本的に内挿しかしないので、完全に新しい形状は生成されません。あくまで異なるトポロジーを統一的に扱えるツールとして使用しています。
3. 特性予測モデル
回転子形状を生成するモデルが得られたので、続いてその形状の運転特性を計算するモデルを構築します。
従来この役割は有限要素解析が担っていました。しかし、有限要素解析は数値計算を行うため、大規模な設計最適化において何度も特性を評価すると、計算時間が膨大となってしまいます。そこで、回転子形状から運転特性を予測するサロゲートモデルを構築します。
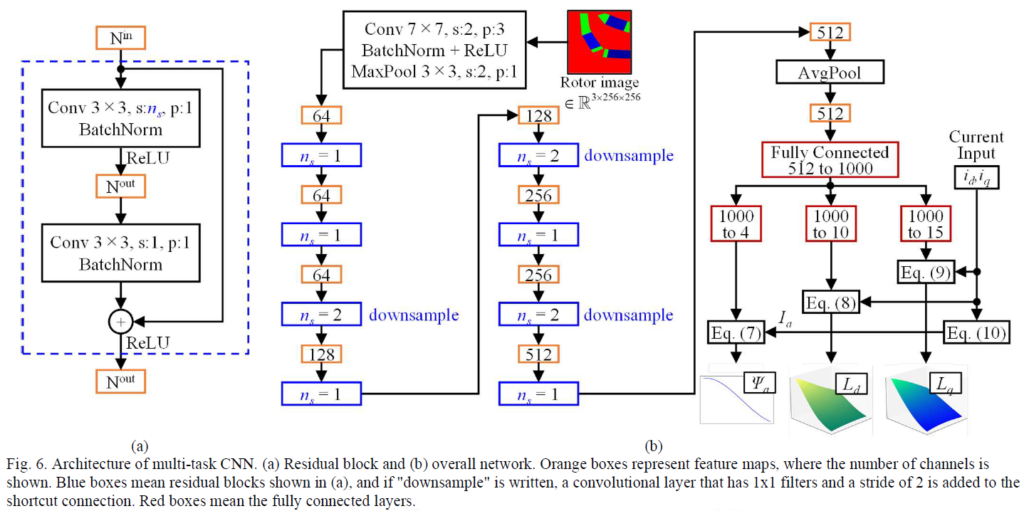
まず、サロゲートモデルの入出力変数を定義します。モデルの入力は、生成モデルにより出力した回転子画像と d,q 軸電流で、モデルの出力は3種類のモータパラメータです。画像から特徴量を抽出するため、畳み込みニューラルネットワーク(CNN: Convolutional Neural Network)を用いた構成とします。
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
![]()
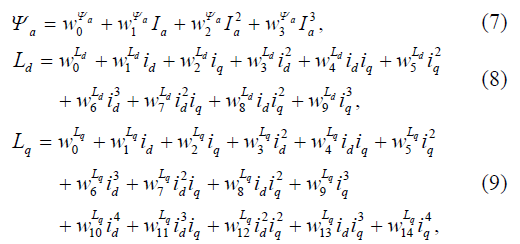
基本構成は comparative study から ResNet-18 とし、出力側をマルチタスクの構成にしました。電流に関する非線形性は明示的に与えています。テストデータに対する予測精度は以下のようになりました。
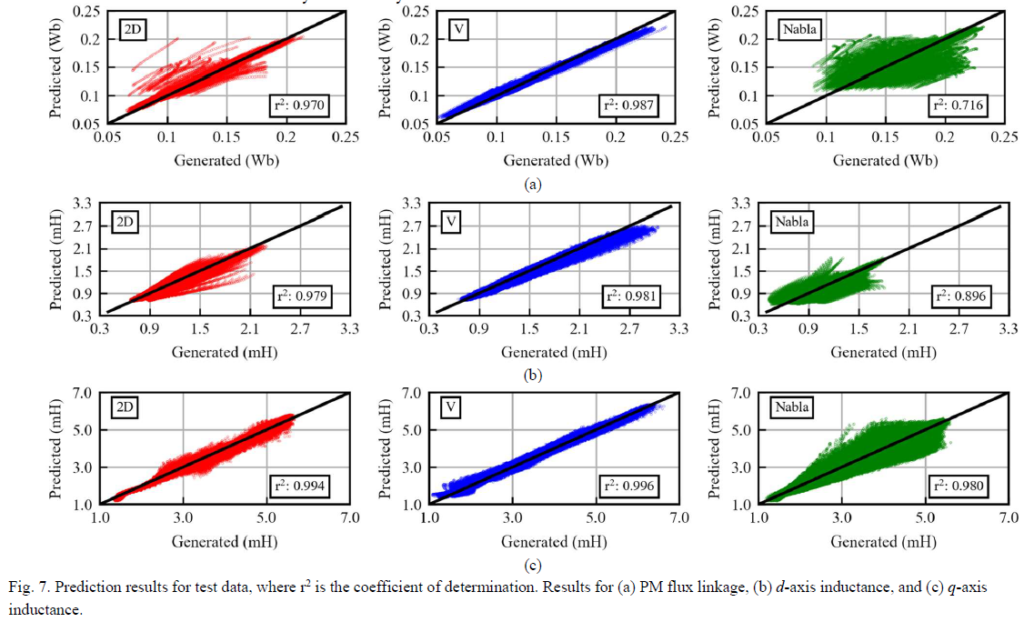
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
ここで、縦軸はモデルの予測結果、横軸は1章で説明した生成データの値であり、有限要素解析の真値ではないことに注意してください。この結果を見ると、Nabla に関する永久磁石による電機子鎖交磁束と d 軸インダクタンスの予測精度が低いことがわかります。これは、データ生成時の機械学習モデルの誤差の影響です。1章で説明した通り、CNNの学習データ自体に、データ生成時のランダムな予測誤差が重畳しているため、CNNの予測精度が低下しています。(むしろ予測精度が高いと誤差まで完璧に予測していることとなり、逆に有限要素解析の真値からは遠ざかります。)
このようにして、有限要素解析のサロゲートモデルを得ることができました。
4. 設計最適化
4.1 問題設定
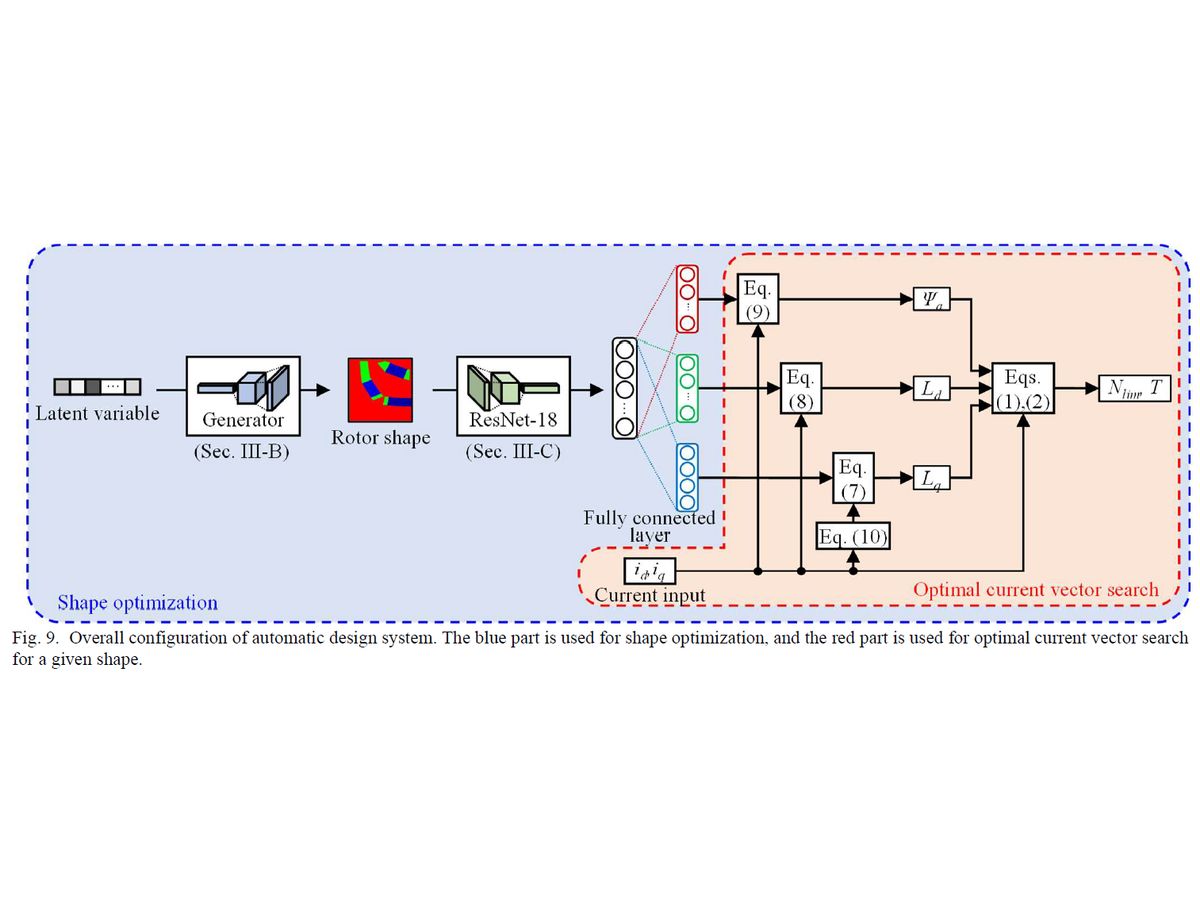
以上の深層学習モデルを統合した自動設計システムは、以下のような構成になります。
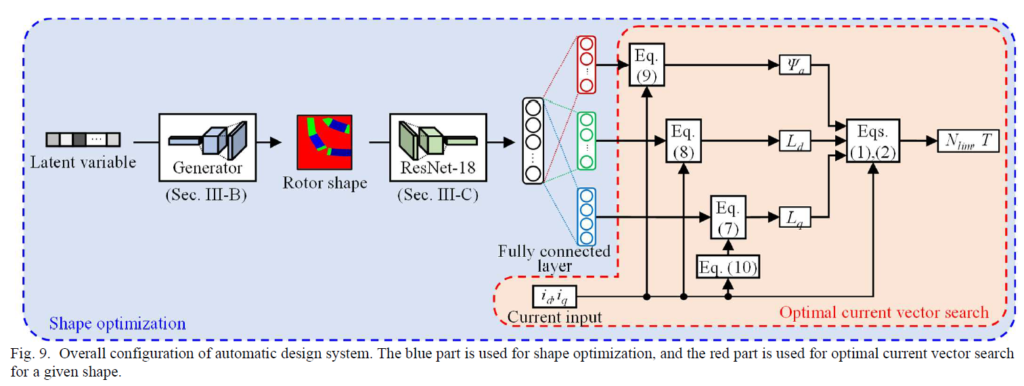
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
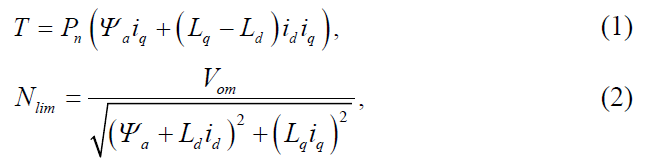
ここで、$T$ はトルク、 $N_{lim}\ は限界速度、$P_n$ は極対数、$V_{om}$ は誘起電圧制限です。
取り組む問題は、磁石量の最小化と最大トルクの最大化に関する多目的多制約最適化です。
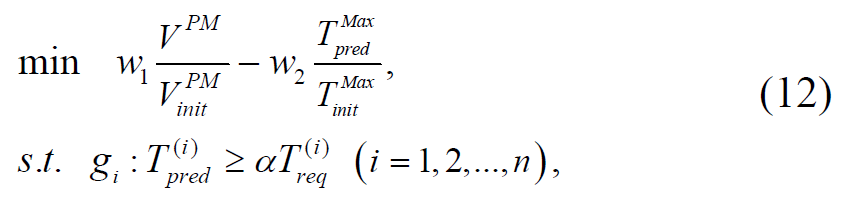
ここで、$V^{PM}, T^{Max}_{pred}$ はそれぞれ各個体の磁石量と最大トルクの予測値であり、$V^{PM}_{init}, T^{Max}_{init}$ で正規化しています。重み係数は $(w_1, w_2)=(1,1)$ としました。制約条件は n 個の要求運転点 $\{( N^{(i)}_{req},T^{(i)}_{req} )\}^{n}_{i=0}$ に関するもので、3%の予測誤差までを許容するため $\alpha=1.03$ の係数を乗じています。
システムのCNNは磁気飽和の影響も考慮して、モータパラメータの電流条件に対する変化まで予測できる構成としました。そのため、最大トルクや制約条件のトルクは最大出力制御により算出しています。

ここで、$I_{am}$は電機子電流の最大値、$T_{CNN}, N_{CNN}$ はCNNで予測したモータパラメータから計算したトルクと限界速度です。
すなわち、Fig. 9 内の記載の通り、本自動設計システムでは「形状最適化」と「最大出力制御による最適電流条件探索」の2種類の最適化問題を解きます。形状最適化は NSGA-II、電流ベクトル探索は Numpy の並列計算で実装したしらみつぶし探索を用います。
4.2 最適化結果
さて、実際にシステムを用いて最適化を行います。制約条件の要求運転点と電流制限は次の3条件とします。
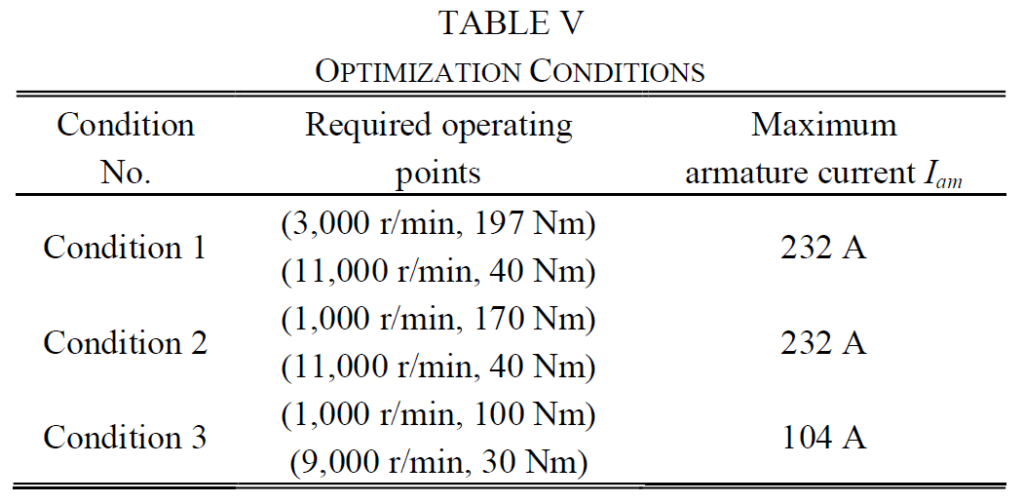
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
最適化結果は次の通りです。
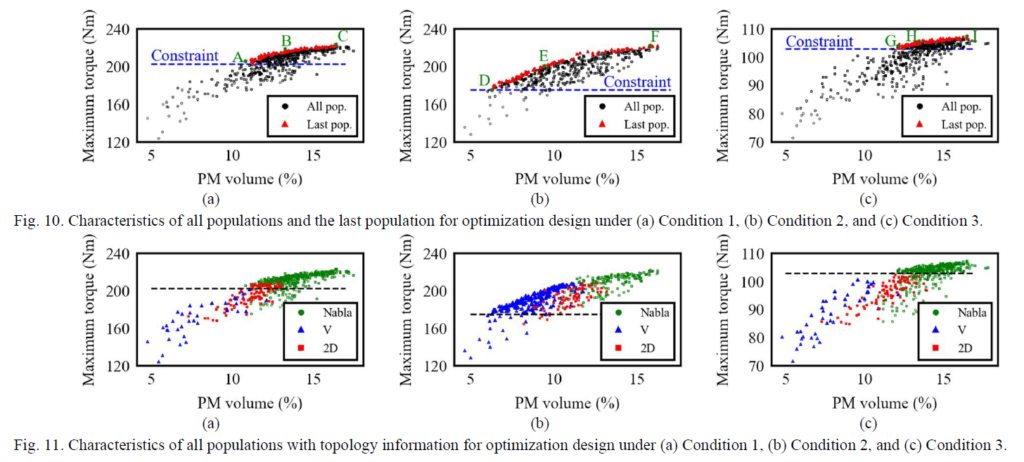
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
条件1と3では、厳しいトルク制約が課されているため、3つのトポロジーの中で最もトルクの得られやすい Nabla が主にパレートフロントを形成しています。他方、条件2では、トルク制約が緩和されたため V もパレート解に選ばれています。2D は効率重視で磁石を多く使用しているため、本設定では最適解に現れませんでした。
続いて、パレート解のシステム予測と有限要素解析解析結果を比較します。
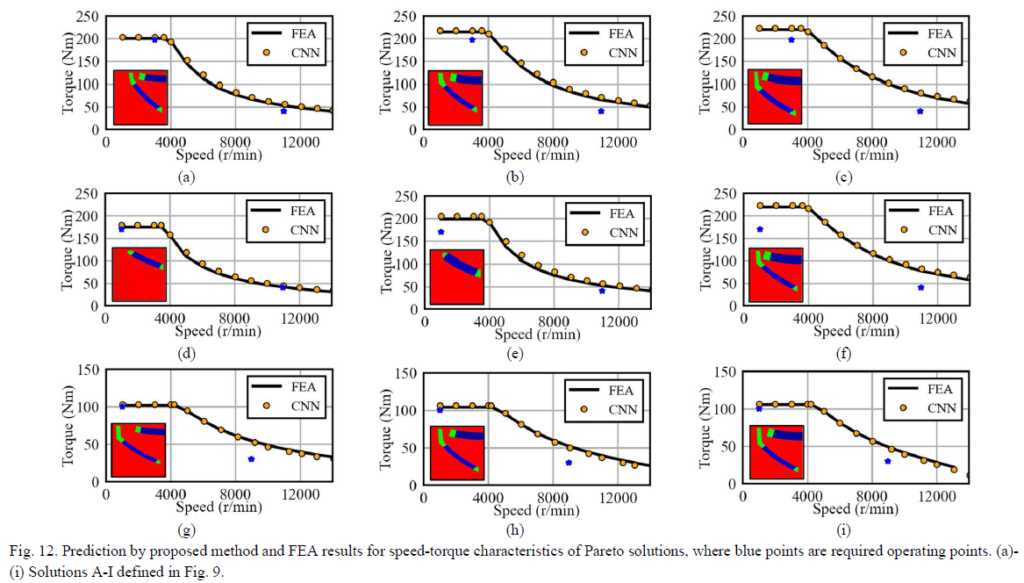
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
どのパレート解もGAN の生成形状は鮮明であり、GAN の有用性がわかります。また、CNN 予測は有限要素解析結果とよく一致しており、すべての解が青点の要求運転点を満足することがわかります。
多くの Nabla 形状に対する予測精度が高いことから、1章で言及していた低精度の機械学習によるデータ生成時の誤差は、CNN によりランダムノイズとして排除されたと言えます。これは、本研究の機械学習を用いたデータ生成手法において、ある程度の機械学習の予測精度の低さは許容されることを示唆しています。
最後に、設計最適化時間に関してです。各条件において100回ずつ設計最適化を実施した際の計算時間を示します。ただし、計算に用いた PC のスペックは CPU: Intel CoreTM i7-9700K, RAM: 32.0 GB, GPU: NVIDIA GeForce RTX 2070 SUPER (8 GB) です。
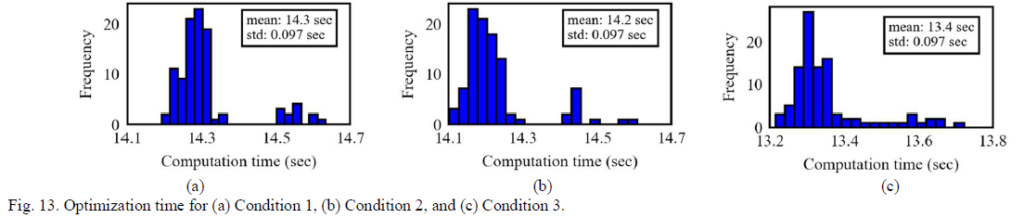
引用元:Automatic Design System with Generative Adversarial Network and Convolutional Neural Network for Optimization Design of Interior Permanent Magnet Synchronous Motor
提案システムを用いた設計最適化は、どの条件でも15秒弱で完了することがわかりました。
5. まとめなど
深層学習を活用したIPMSMの自動設計システムを提案しました。学習に使用したデータセットやプログラムは全て公開しています。
現在の設計システムの適用範囲は限定的ですが、入力側(磁性材料、外径・積厚、ステータ、駆動回路など)や出力側(効率、減磁、熱、応力、リプル・振動など)の双方の側面で適用範囲を拡大する研究を実施中です。この構成の深層学習では、完全に新しいモータ形状を生み出すことは難しいですが、それでも多種多様な入出力関係を同時に短時間で考慮できる汎用モータ設計 AI は非常に有用で、モータ設計のあり方は間違いなく変化します。昨今の機械学習分野の技術発展は凄まじく、その影響はモータ分野にも必ず波及します。本研究から、その可能性を少しでも感じ取ってもらえると幸いです。
共同研究(産学どちらも)のお誘いや、技術員・研究員(学生含む)の募集は常に行っています。興味のある方はぜひお声がけください!
以上です。質問・コメント等ございましたら、メールやTwitterよりご連絡ください。

