 統計・機械学習
統計・機械学習 最小二乗法を用いた回帰分析ー②重回帰分析と非線形回帰分析ー【Pythonプログラム付】
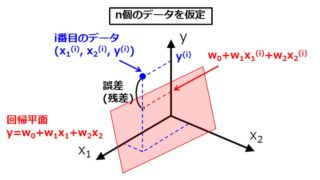
統計や機械学習において最も基本的な回帰分析手法は(通常)最小二乗法(OLS:Ordinary Least Squares)です。その中でも説明変数(x)が一つしかない回帰分析を単回帰分析といいます。
しかし,現実にある様々な事象は複数...
統計・機械学習 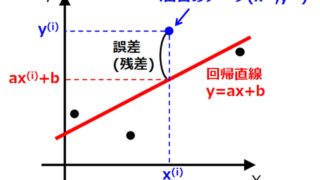 統計・機械学習
統計・機械学習  モータ技術
モータ技術  モータ技術
モータ技術  用語解説
用語解説  モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術