 モータ技術
モータ技術 最大出力制御とは何かー②最大トルク/磁束制御(MTPF Control)ー
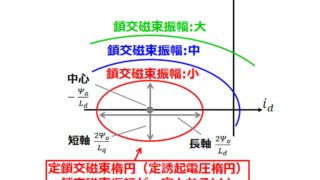
最大トルク/磁束(MTPF; Maximum Torqe Per Flux-linkage)制御は同期モータの高速運転時に使用される基本的な制御法のうちの一つです。本記事では,MTPF制御について説明します。
関連記事はこちら↓からど...
モータ技術 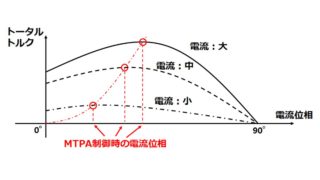 モータ技術
モータ技術 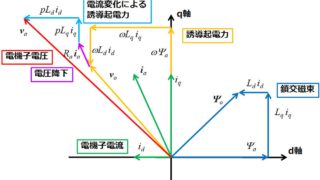 モータ技術
モータ技術 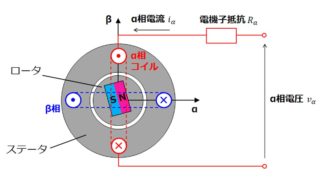 モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術  モータ技術
モータ技術